
 Controller/Fieldbus
Controller/Fieldbus Leadscrew Motor
Leadscrew Motor JMC Overview
JMC Overview




Global-Service:oversea@jmc-motion.com (JoJo)
Phone:+86 17722603980
Whatsapp/WeChat:+86 17722603980
Skype:+86 17722603980
Products

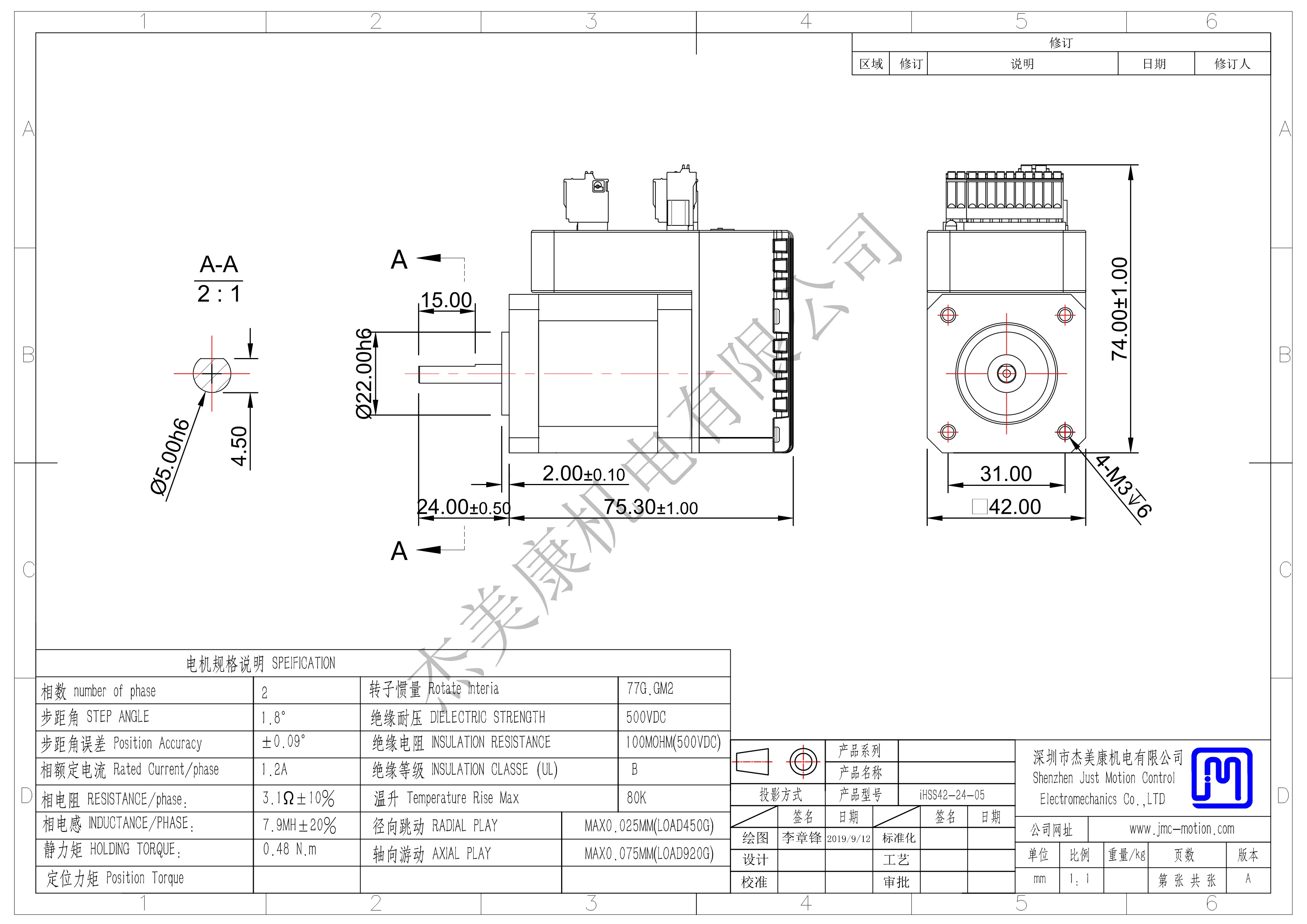
Drawing
 Contact us
Contact us
North America:
sales1@jmc-motion.com(Holly)
Europe:
sales2@jmc-motion.com (Sophie)
Middle East:
sales5@jmc-motion.com (George)
Southeast Asia:
jmk@jmc-motion.com (Asha)
South America:
jmcxx@jmc-motion.com (Jackson)
Global Service:
oversea@jmc-motion.com (JoJo)
Phone:+86 17722603980
Whatsapp/WeChat:+86 17722603980
Skype:+86 17722603980
